About
This project is a product of a series of homeworks for the course Geometry of Computer Vision and Computer Graphics. During the course we were tasked with creating Matlab scripts about topics such as homography, panorama creation, autocalibration from vanishing points and finally epipolar geometry.


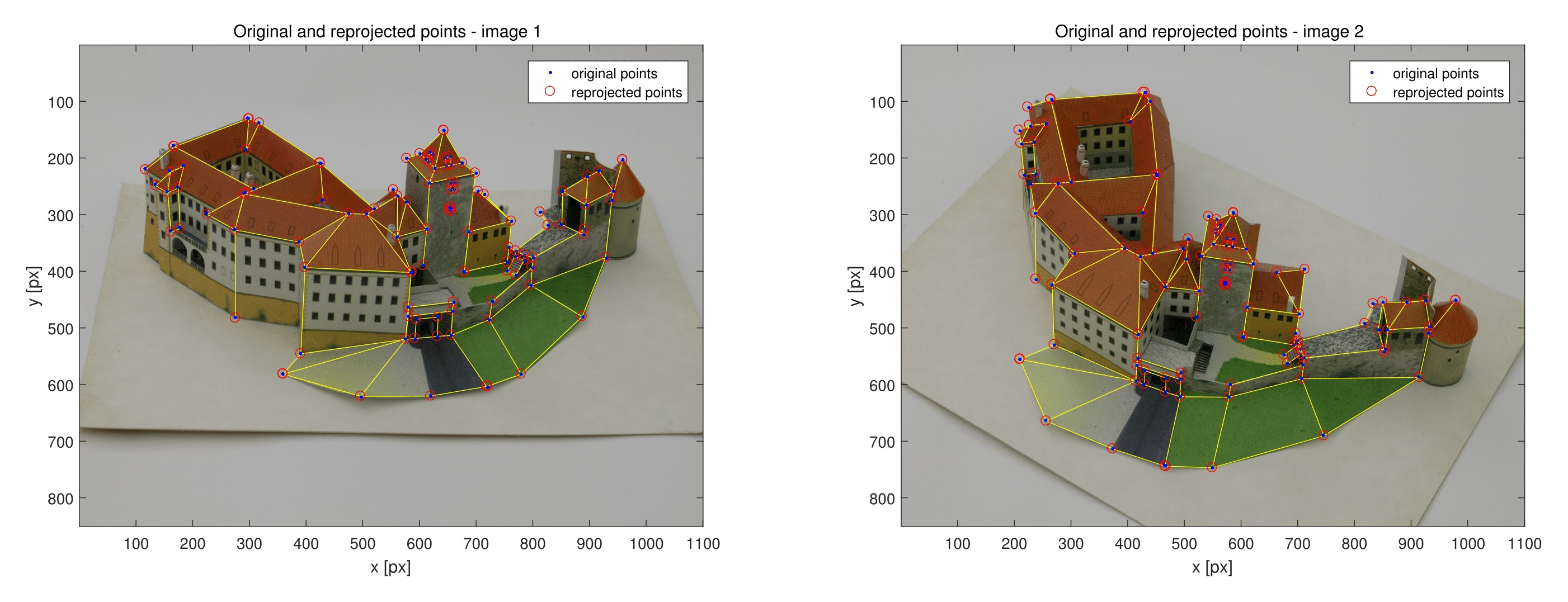
The final homework and this particular project was computing the essential matrix from the fundamental matrix and camera calibration. The input are two images of a single object obtained where both pictures were taken by the same camera (therefore the calibration matrix is the same for both projection matrices). The user inputs point correspondences for the two given images and the script selects such pairs that minimize epipolar error. The two projection matrices for both cameras are computed from which the final 3D point coordinates are obtained. The edges of the model are manually set in the script itself.